

1.調速機の電気的性能仕様
(1)電圧範囲:DC5V~28V。
(2)定格電流:MAX2A、より大きな電流でモーターを制御するために、モーター電源ラインは調速機を介さずに直接電源に接続されます。
(3)PWM出力周波数:0~100KHz。
(4)アナログ電圧出力:0~5V。
(5)動作温度:-10℃-70℃、保管温度:-30℃-125℃。
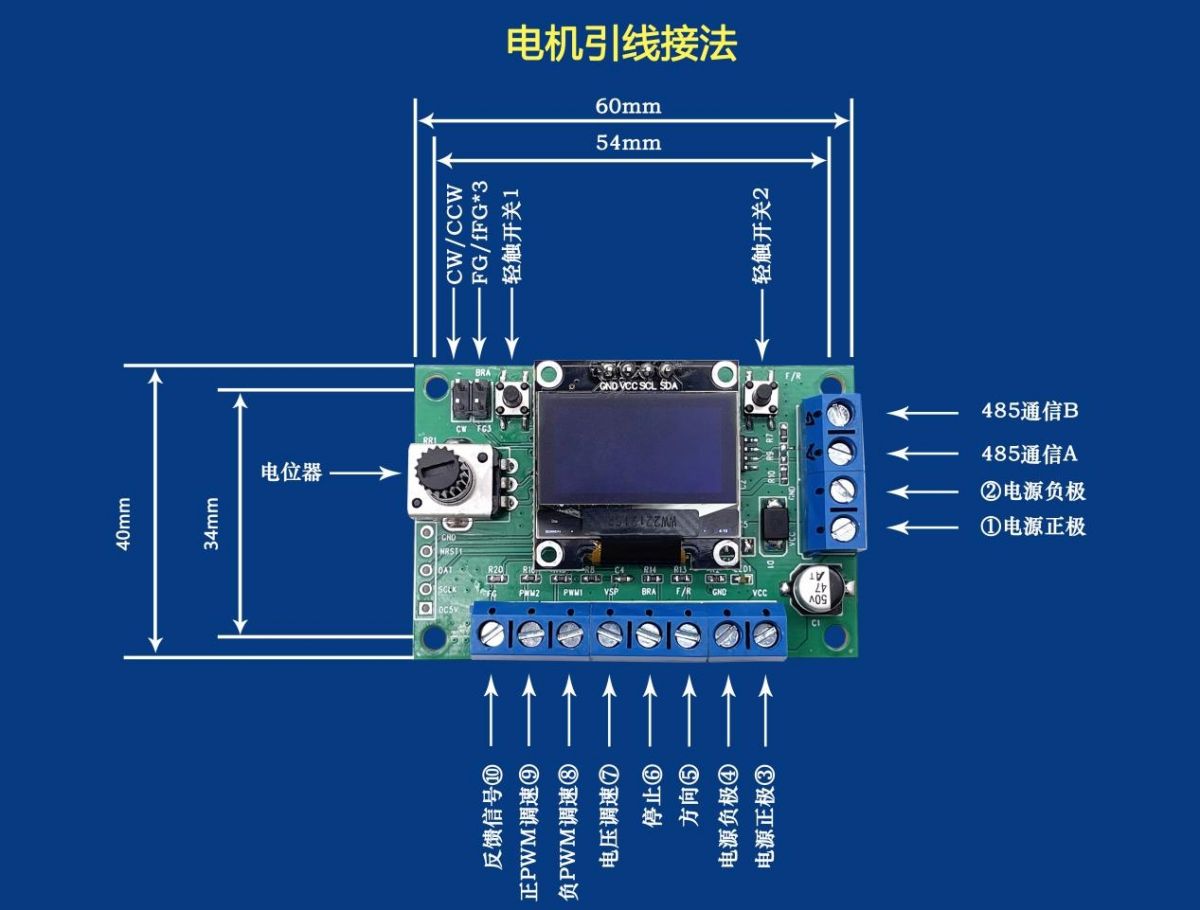
(6)ドライバーボードサイズ:長さ60mm×幅40mm

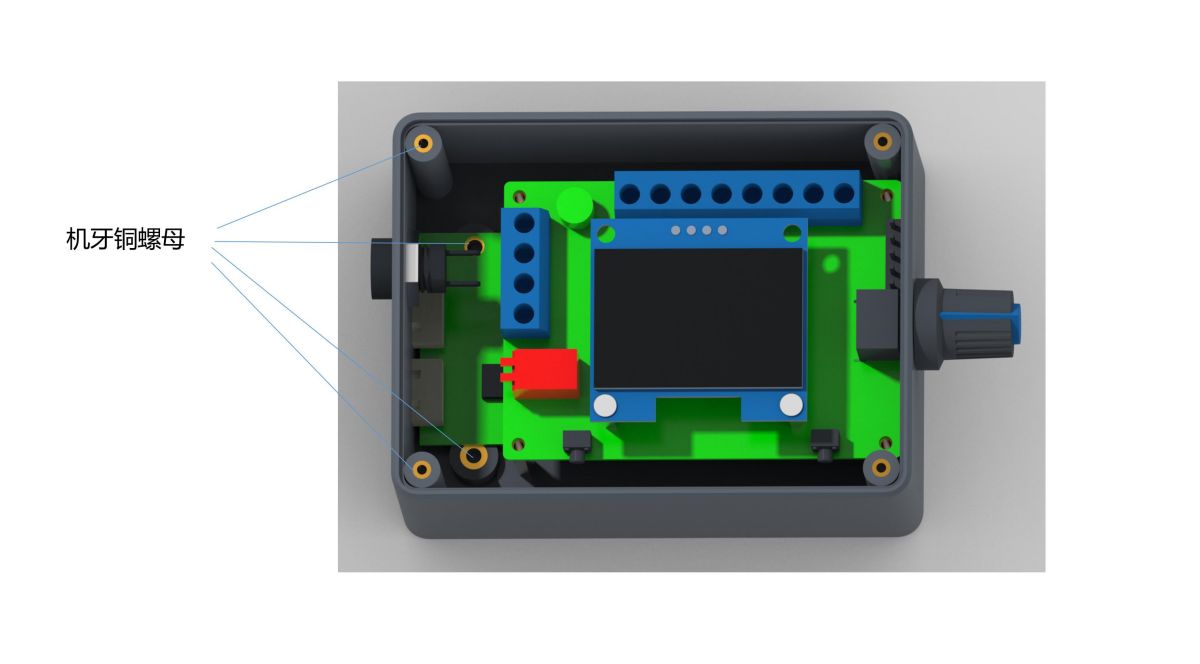
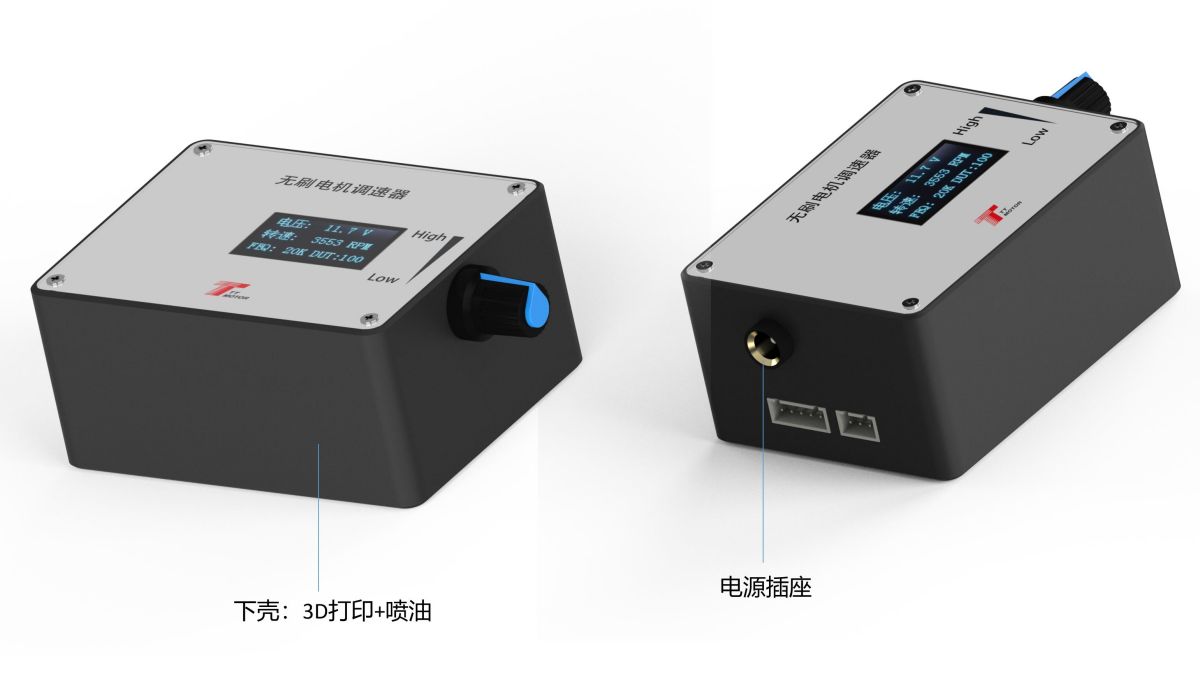
2. 調速機の配線と内部機能の説明
① ガバナー、モーター電源正入力。
②ガバナー、モーター電源入力マイナス。
③モーター電源のプラス出力。
④モーター電源のマイナス出力。
⑤ 正負回転制御の高レベルおよび低レベル出力、高レベル 5V、低レベル 0V、タッチスイッチ 2 (F/R) によって制御され、デフォルトは高レベルです。
⑥ ブレーキ制御の高レベルと低レベル出力、高レベル 5V、低レベル 0V、タッチスイッチ 1 (BRA) によって制御され、電源オンのデフォルトは高レベルです。
7 アナログ電圧出力(0〜5V)。このインターフェースは、アナログ電圧速度制御モーターを受け入れるのに適しています。
8PWM1逆出力、このインターフェースはPWM速度調整を受け入れるモーターに適しており、速度はデューティサイクルに反比例します。
⑨PWM2順方向出力。このインターフェースはPWM速度調整を受け入れるモーターに適しており、速度はデューティサイクルに比例します。
⑦-⑨ 3つのインターフェースの出力信号の変化はポテンショメータによって調整されます。
⑩モーターフィードバック信号入力。
注:FG/FG*3は、ジャンパーキャップを追加するかどうかにかかわらず、実際のモーターのフィードバック時間に基づいて決定する必要があります。ジャンパーキャップがない場合はFGの1倍、ジャンパーキャップを増やすとFG*3の3倍になります。CW/CCWも同様です。
3. いくつかのパラメータ設定を調整する
(1)周波数設定:電源投入前にタッチスイッチ1を押したままにし、そのまま離さないでください。その後、調速機の電源を入れます。ボタンを離した際に画面に「FEQ:20K」と表示されるまで待ちます。その後、スイッチ1をタッチすると周波数が下がり、スイッチ2をタッチすると周波数が上がります。周波数は指定の周波数に調整可能です。工場出荷時のデフォルトは20KHzです。
(2)極数の設定:電源投入前にライトタッチスイッチ1とライトタッチスイッチ2を同時に押したまま放さずに、調速機基板に電源を入れます。画面に「極数:1極」と表示されるまで待ち、ボタンを放します。すると、ライトタッチスイッチ1が減り、ライトタッチスイッチ2が増えます。調整可能な極数はモーターの設計極数であり、工場出荷時のデフォルトは1極です。
(3)フィードバック設定:図1では、FG / FG * 3ピンがフィードバック倍数として設定されており、モーターのフィードバック倍数がFGの1倍か3倍かによって設定されます。ジャンパーキャップを追加するとFGの3倍になり、ジャンパーキャップを追加しないとFGの1倍になります。
(4)方向設定:図1のCW/CCWピンは、モータの初期状態における方向設定です。モータ方向制御線が停止している状態で、モータがCW方向かCCW方向かによって設定されます。スキップキャップを付加した場合はCCW方向、スキップキャップを付加しない場合はCW方向となります。
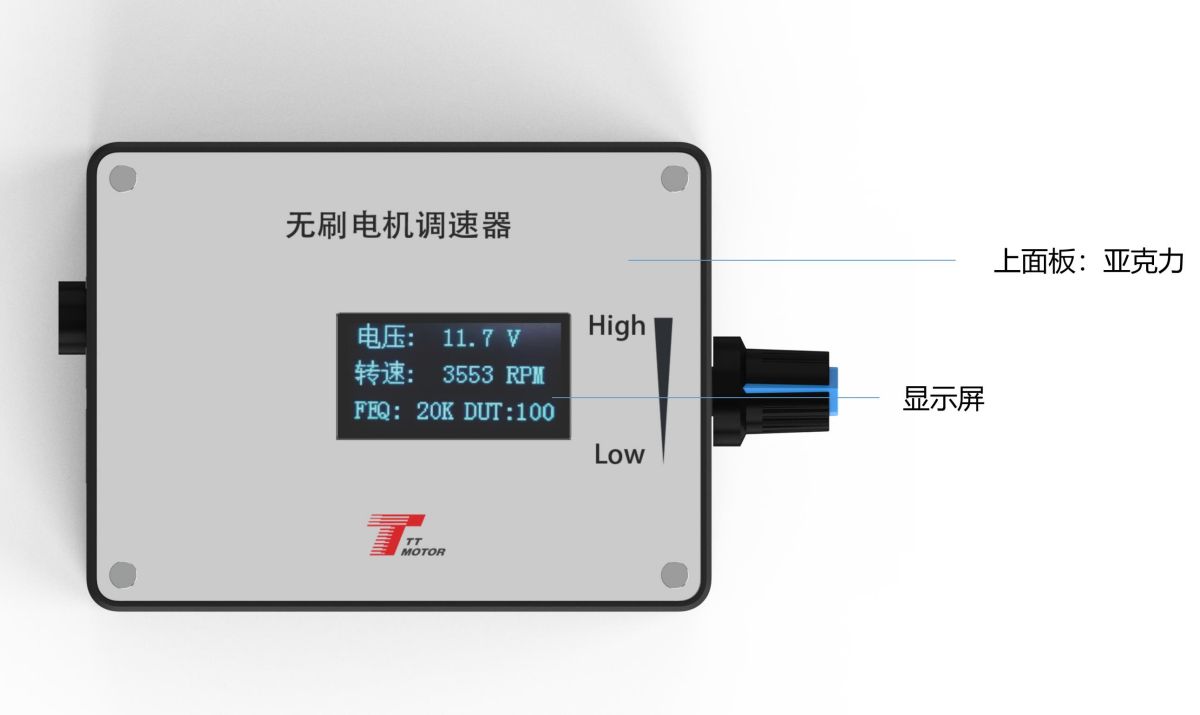
メイン:電流画面には、主に入力電圧、回転速度、周波数、デューティサイクルが表示されます。回転速度は通常表示のFG/FG*3、極数に設定する必要があります。


4. 知事の注意事項
(1)調速機のプラスとマイナスの電源は指示に従って接続しなければならず、逆に接続してはいけません。そうしないと、調速機が作動せず、調速機が焼損する恐れがあります。
(2)調速機は、モータを上記制御インターフェースに適合させるために使用される。
3、⑤~⑨5つのポートは5V以上の電圧にアクセスできません。

投稿日時: 2023年7月21日