


遠隔操作ロボットは、倒壊した建物の生存者捜索など、緊急事態においてますます重要な役割を担うようになっている。

潜在的に危険な物質の探知、人質事件、その他の法執行およびテロ対策措置。この特殊な遠隔操作装置は、必要な危険な作業を実行する際に人間の作業員の代わりに高精度マイクロモーターを使用することで、関係者のリスクを大幅に軽減できます。精密な操作と精密な工具操作は、2つの重要な前提条件です。
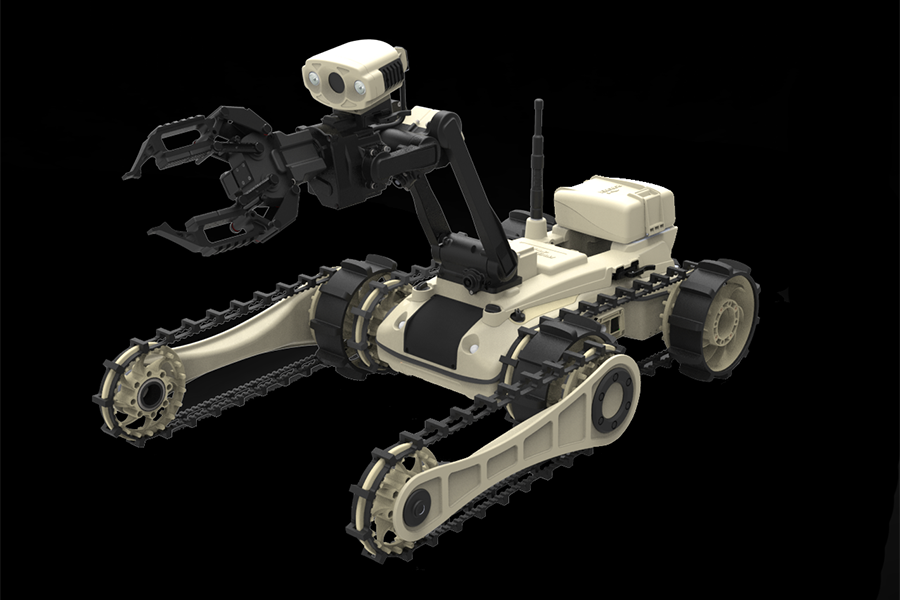
技術の進化と向上に伴い、ロボットはより複雑で困難な作業にも応用できるようになっています。その結果、ロボットは、産業活動、法執行機関、テロ対策など、人間にとって危険すぎる緊急事態において、不審物の特定や爆弾の解除といった用途でますます広く利用されるようになっています。このような極限状況下での使用を想定し、ロボットは特定の要件を満たすために可能な限り小型化する必要があります。把持アームは、さまざまな作業に対応するために必要な精度とパワーを発揮しながら、柔軟な動作パターンを実現しなければなりません。消費電力も重要な要素であり、駆動効率が高いほどバッテリー寿命が長くなります。高性能マイクロモーターは、遠隔操作ロボットの分野で重要な役割を担っており、こうしたニーズに完璧に応えています。
これは、より小型の偵察ロボットにも当てはまる。

カメラを搭載し、時には使用現場に直接投下されることもあるこれらの車両は、衝撃、その他の振動、粉塵、あるいはより危険な可能性のある場所での熱に耐えなければなりません。この場合、人間が直接現場に行って生存者を探すことはできません。UGV(無人地上車両)はまさにそれを行うことができます。そして、トルクを増大させる遊星減速機と組み合わせたFAULHABER DCマイクロモーターのおかげで、UGVは非常に信頼性が高くなっています。UGVの小型サイズにより、倒壊した建物をリスクなく捜索でき、リアルタイムの画像を送信できるため、戦術的な対応に関して緊急対応要員にとって重要な意思決定ツールとなります。
コンパクトな駆動装置にDC精密モーターとギアを組み合わせた、様々な駆動作業に適したロボットです。頑丈で信頼性が高く、しかも低価格です。
今日では、移動ロボットは、人間にとって重大な危険が伴うような危機的な状況や、産業活動の一部において広く利用されている。

法執行機関やテロ対策、例えば不審物の特定や爆弾の解除といった場面では、こうした「車両操作ロボット」は特定のニーズを満たすことが求められます。精密な操作と精密な工具操作は、その基本的な前提条件です。もちろん、狭い通路を通過できるよう、装置はできるだけ小型でなければなりません。当然ながら、こうしたロボットに使用されるアクチュエータは非常に高性能です。特に高性能なマイクロモーターは重要な構成要素となっています。

とはいえ、腕の先に30kgの重さを持ち上げるだけでも、かなりの難題だ。
同時に、特定の作業には力任せではなく精密さが求められます。さらに、アームアセンブリの設置スペースは非常に限られています。そのため、グリッパーには軽量かつコンパクトなアクチュエータが不可欠です。これらの厳しい要件を満たすには、グリッパーが360度回転できるだけでなく、必要な精度と多様な作業に対応できる能力を備えている必要があります。
バッテリー駆動デバイスを使用する際、消費電力も重要な役割を果たします。伝達効率が高いほど、サービス時間が長くなります。「駆動の問題」は、遊星歯車とブレーキを備えたDCマイクロモーターを使用して解決されます。3557シリーズのモーターは、定格電圧6~48Vで最大26Wで動作し、38/2シリーズのプリセットギアと組み合わせることで、駆動力を10Nmまで高めることができます。オールメタルギアは頑丈なだけでなく、過渡的なピーク負荷にも敏感ではありません。減速比は3.7:1から1526:1まで選択できます。コンパクトなモーターギアは、マニピュレーターの上部領域に密に配置されます。統合されたブレーキにより、停電時にも最終位置が確保されます。さらに、コンパクトなコンポーネントはメンテナンスが容易で、破損した部品は迅速に交換できます。もう1つの重要な利点は、強力なDCブラシ付きモーターは、シンプルな電流制限制御のみを必要とすることです。電流強度のフィードバックは、背圧によってリモートコントロールレバーに伝達され、オペレーターにグリッパーまたは「手首」を操作する力の感覚を与えます。コンパクトな駆動アセンブリは、精密なDCモーターと調整ギアで構成されています。さまざまな駆動タスクに適しています。強力で信頼性が高く、安価です。標準コンポーネントモーターのシンプルな操作は、安価、高速、信頼性の要件を満たしています。